Deep Learning - Training¶
We are using Keras as the deep learning framework with TensorFlow as a backend. Additionally, we make an assumption that the data has shape (320, 456) that corresponds to the 25 micron atlas.
Training data¶
To avoid wasting time on generating geometric augmentations on the fly we assume the user already precomputed them
and stored in an .h5 file. To see more details read Deep Learning - Generating a dataset.
SupervisedGenerator¶
The goal is to train the network via the fit_generator method of a keras.Model. In atlalign one
can use the utility class atlalign.ml_utils.SupervisedGenerator. The main parameter it expects in the constructor
is the path to the .h5 file. It needs to contain the following datasets
Name |
Description |
shape |
dtype |
img |
Grayscale moving image (0-255 intensities) |
(n, 320, 456) |
uint8 |
deltas_xy |
Deltas for forward transformation (mov2reg) |
(n, 320, 456, 2) |
float16 |
inv_deltas_xy |
Deltas for inverse transformation (reg2mov) |
(n, 320, 456, 2) |
float16 |
p |
Coronal section in microns |
(n,) |
int |
image_id |
Allen image section identifier |
(n,) |
int |
dataset_id |
Allen dataset identifier |
(n,) |
int |
As additional parameters, one can specify
batch_size- batch size to train the network onshuffle- if True, than dataset shuffled in the sample dimension at the end of each epochaugmenter_ref- instance ofimgaug.augmenters.Augmenterrepresenting intensity augmentations applied to the referenceaugmenter_mov- instance ofimgaug.augmenters.Augmenterrepresenting intensity augmentations applied to the movingreturn_inverse- ifTruethen yielding also the inverser transformation
What does the SupervisedGenerator yield? It is always 2 objects
If return_inverse=False then:
X- array of shape (batch_size, 320, 456, 2) representing the reference and moving images[reg_images, deltas_xy]reg_images- array of shape (batch_size, 320, 456, 1) representing registered imagesdeltas_xy- array of shape (batch_size, 320, 456, 2) representing x and y displacements
If return_inverse=True then:
[X_rm, X_mr]X_rm- array of shape (batch_size, 320, 456, 2) representing the reference and moving imagesX_mr- array of shape (batch_size, 320, 456, 2) representing the moving and reference images (swappedX_mr)
[reg_images, deltas_xy, inv_deltas_xy]reg_images- array of shape (batch_size, 320, 456, 1) representing registered imagesdeltas_xy- array of shape (batch_size, 320, 456, 2) representing x and y displacementsinv_deltas_xy- array of shape (batch_size, 320, 456, 2) representing x and y displacements of the inverse mapping
from atlalign.ml_utils import SupervisedGenerator, augmenter_1
path = '/path/to/file.h5'
gen = SupervisedGenerator(path,
batch_size=32,
augmenter_mov=augmenter_1()
)
gen_inv = SupervisedGenerator(path,
batch_size=32,
augmenter_mov=augmenter_1(),
return_inverse=True
)
len(gen[0]) == 2
len(gen_inv[0]) == 2
Custom Layers¶
Before delving into the architectures let us first describe 3 custom layers (implemented in atlalign.ml_utils.layers):
Affine2DVF- Turns (2,3) affine matrix to a delta_x and delta_y (displacement field) with a fixed shape
BillinearInterpolation- Differentiable version ofwarpmethod of theDisplacementField
DVFComposition- Differentiable version of__call__method of theDisplacementField
Architecture¶
Ideally, we want to have two networks that take care of global resp. local transformations. In other words the first network makes sure that the moving and reference images are of the same scale, rotation and position. The second network allows for a more fine-grained alignment of specific parts of the image.
Based on experiments we highly recommend training these two networks separately. When both of them are good enough we can merge them into a single network.
Global¶
The global network is conceptually identical to the Spatial Transformer Network - STN. The goal is to have a regressor network that predicts a set of parameters that fully define a transformation. The most common example (and also the one we implemented) is to find parameters of an 2D affine transformation (6 parameters). Instead of using the actual ground truth matrix we train the network on a different task - image registration.
We provide a utility function atlalign.nn.supervised_global_model_factory that outputs keras.Model that
corresponds to chosen hyperparamters. See below an example how to create a network that had the best performance
during our experiments.
from atlalign.nn import supervised_global_model_factory
filters = (16, 16, 32, 32, 32)
dense_layers = (40,)
losses = ('perceptual_loss_net-lin_vgg', 'vector_distance')
model_g = supervised_global_model_factory(filters=filters,
dense_layers=dense_layers)
This is how the model looks like inside:
Layer (type) Output Shape Param # Connected to
==================================================================================================
input_1 (InputLayer) (None, 320, 456, 2) 0
__________________________________________________________________________________________________
conv2d_1 (Conv2D) (None, 320, 456, 16) 304 input_1[0][0]
__________________________________________________________________________________________________
conv2d_2 (Conv2D) (None, 320, 456, 16) 2320 conv2d_1[0][0]
__________________________________________________________________________________________________
max_pooling2d_1 (MaxPooling2D) (None, 160, 228, 16) 0 conv2d_2[0][0]
__________________________________________________________________________________________________
conv2d_3 (Conv2D) (None, 160, 228, 16) 2320 max_pooling2d_1[0][0]
__________________________________________________________________________________________________
conv2d_4 (Conv2D) (None, 160, 228, 16) 2320 conv2d_3[0][0]
__________________________________________________________________________________________________
max_pooling2d_2 (MaxPooling2D) (None, 80, 114, 16) 0 conv2d_4[0][0]
__________________________________________________________________________________________________
conv2d_5 (Conv2D) (None, 80, 114, 32) 4640 max_pooling2d_2[0][0]
__________________________________________________________________________________________________
conv2d_6 (Conv2D) (None, 80, 114, 32) 9248 conv2d_5[0][0]
__________________________________________________________________________________________________
max_pooling2d_3 (MaxPooling2D) (None, 40, 57, 32) 0 conv2d_6[0][0]
__________________________________________________________________________________________________
conv2d_7 (Conv2D) (None, 40, 57, 32) 9248 max_pooling2d_3[0][0]
__________________________________________________________________________________________________
conv2d_8 (Conv2D) (None, 40, 57, 32) 9248 conv2d_7[0][0]
__________________________________________________________________________________________________
max_pooling2d_4 (MaxPooling2D) (None, 20, 28, 32) 0 conv2d_8[0][0]
__________________________________________________________________________________________________
conv2d_9 (Conv2D) (None, 20, 28, 32) 9248 max_pooling2d_4[0][0]
__________________________________________________________________________________________________
conv2d_10 (Conv2D) (None, 20, 28, 32) 9248 conv2d_9[0][0]
__________________________________________________________________________________________________
max_pooling2d_5 (MaxPooling2D) (None, 10, 14, 32) 0 conv2d_10[0][0]
__________________________________________________________________________________________________
flatten_1 (Flatten) (None, 4480) 0 max_pooling2d_5[0][0]
__________________________________________________________________________________________________
dense_1 (Dense) (None, 40) 179240 flatten_1[0][0]
__________________________________________________________________________________________________
dense_2 (Dense) (None, 6) 246 dense_1[0][0]
__________________________________________________________________________________________________
reshape_1 (Reshape) (None, 2, 3) 0 dense_2[0][0]
__________________________________________________________________________________________________
extract_moving (Lambda) (None, 320, 456, 1) 0 input_1[0][0]
__________________________________________________________________________________________________
affine2dvf_1 (Affine2DVF) (None, 320, 456, 2) 0 reshape_1[0][0]
__________________________________________________________________________________________________
img_registered (BilinearInterpo (None, 320, 456, 1) 0 extract_moving[0][0]
affine2dvf_1[0][0]
==================================================================================================
Total params: 237,630
Trainable params: 237,630
Non-trainable params: 0
Note that one can create a custom network as long as the inputs and the outputs are compatible with the
SupervisedGenerator.
Local¶
The most popular type of network to use for the local displacements is a UNet. Similarly to the global case,
we provide a convenience factory function atlalign.nn.supervised_model_factory that outputs
an instance of keras.Model given the selected hyperparameters.
See below an example with the best hyperparameters find during experiments.
import tensorflow as tf
from atlalign.nn import supervised_model_factory
start_filters = (16,)
downsample_filters = (16, 32, 32, 32)
middle_filters = (32,)
upsample_filters = (32, 32, 32, 32)
end_filters = (64, 64)
compute_inv = True
losses = ('perceptual_loss_net-lin_vgg', 'perceptual_loss_net-lin_vgg&vdclip2', 'perceptual_loss_net-lin_vgg')
losses_weights = (1, 1, 1)
model_l = supervised_model_factory(start_filters=start_filters,
downsample_filters=downsample_filters,
middle_filters=middle_filters,
upsample_filters=upsample_filters,
end_filters=end_filters,
compute_inv=compute_inv,
losses=losses,
losses_weights=losses_weights)
Layer (type) Output Shape Param # Connected to
==================================================================================================
reg_mov (InputLayer) (None, 320, 456, 2) 0
__________________________________________________________________________________________________
cropping2d_1 (Cropping2D) (None, 320, 448, 2) 0 reg_mov[0][0]
__________________________________________________________________________________________________
conv2d_1 (Conv2D) (None, 320, 448, 16) 304 cropping2d_1[0][0]
__________________________________________________________________________________________________
leaky_re_lu_1 (LeakyReLU) (None, 320, 448, 16) 0 conv2d_1[0][0]
__________________________________________________________________________________________________
max_pooling2d_1 (MaxPooling2D) (None, 160, 224, 16) 0 leaky_re_lu_1[0][0]
__________________________________________________________________________________________________
conv2d_2 (Conv2D) (None, 160, 224, 16) 2320 max_pooling2d_1[0][0]
__________________________________________________________________________________________________
leaky_re_lu_2 (LeakyReLU) (None, 160, 224, 16) 0 conv2d_2[0][0]
__________________________________________________________________________________________________
max_pooling2d_2 (MaxPooling2D) (None, 80, 112, 16) 0 leaky_re_lu_2[0][0]
__________________________________________________________________________________________________
conv2d_3 (Conv2D) (None, 80, 112, 32) 4640 max_pooling2d_2[0][0]
__________________________________________________________________________________________________
leaky_re_lu_3 (LeakyReLU) (None, 80, 112, 32) 0 conv2d_3[0][0]
__________________________________________________________________________________________________
max_pooling2d_3 (MaxPooling2D) (None, 40, 56, 32) 0 leaky_re_lu_3[0][0]
__________________________________________________________________________________________________
conv2d_4 (Conv2D) (None, 40, 56, 32) 9248 max_pooling2d_3[0][0]
__________________________________________________________________________________________________
leaky_re_lu_4 (LeakyReLU) (None, 40, 56, 32) 0 conv2d_4[0][0]
__________________________________________________________________________________________________
max_pooling2d_4 (MaxPooling2D) (None, 20, 28, 32) 0 leaky_re_lu_4[0][0]
__________________________________________________________________________________________________
conv2d_5 (Conv2D) (None, 20, 28, 32) 9248 max_pooling2d_4[0][0]
__________________________________________________________________________________________________
leaky_re_lu_5 (LeakyReLU) (None, 20, 28, 32) 0 conv2d_5[0][0]
__________________________________________________________________________________________________
conv2d_6 (Conv2D) (None, 20, 28, 32) 9248 leaky_re_lu_5[0][0]
__________________________________________________________________________________________________
leaky_re_lu_6 (LeakyReLU) (None, 20, 28, 32) 0 conv2d_6[0][0]
__________________________________________________________________________________________________
up_sampling2d_1 (UpSampling2D) (None, 40, 56, 32) 0 leaky_re_lu_6[0][0]
__________________________________________________________________________________________________
conv2d_7 (Conv2D) (None, 40, 56, 32) 9248 up_sampling2d_1[0][0]
__________________________________________________________________________________________________
leaky_re_lu_7 (LeakyReLU) (None, 40, 56, 32) 0 conv2d_7[0][0]
__________________________________________________________________________________________________
concatenate_1 (Concatenate) (None, 40, 56, 64) 0 leaky_re_lu_7[0][0]
leaky_re_lu_4[0][0]
__________________________________________________________________________________________________
conv2d_8 (Conv2D) (None, 40, 56, 32) 18464 concatenate_1[0][0]
__________________________________________________________________________________________________
leaky_re_lu_8 (LeakyReLU) (None, 40, 56, 32) 0 conv2d_8[0][0]
__________________________________________________________________________________________________
up_sampling2d_2 (UpSampling2D) (None, 80, 112, 32) 0 leaky_re_lu_8[0][0]
__________________________________________________________________________________________________
conv2d_9 (Conv2D) (None, 80, 112, 32) 9248 up_sampling2d_2[0][0]
__________________________________________________________________________________________________
leaky_re_lu_9 (LeakyReLU) (None, 80, 112, 32) 0 conv2d_9[0][0]
__________________________________________________________________________________________________
concatenate_2 (Concatenate) (None, 80, 112, 64) 0 leaky_re_lu_9[0][0]
leaky_re_lu_3[0][0]
__________________________________________________________________________________________________
conv2d_10 (Conv2D) (None, 80, 112, 32) 18464 concatenate_2[0][0]
__________________________________________________________________________________________________
leaky_re_lu_10 (LeakyReLU) (None, 80, 112, 32) 0 conv2d_10[0][0]
__________________________________________________________________________________________________
up_sampling2d_3 (UpSampling2D) (None, 160, 224, 32) 0 leaky_re_lu_10[0][0]
__________________________________________________________________________________________________
conv2d_11 (Conv2D) (None, 160, 224, 32) 9248 up_sampling2d_3[0][0]
__________________________________________________________________________________________________
leaky_re_lu_11 (LeakyReLU) (None, 160, 224, 32) 0 conv2d_11[0][0]
__________________________________________________________________________________________________
concatenate_3 (Concatenate) (None, 160, 224, 48) 0 leaky_re_lu_11[0][0]
leaky_re_lu_2[0][0]
__________________________________________________________________________________________________
conv2d_12 (Conv2D) (None, 160, 224, 32) 13856 concatenate_3[0][0]
__________________________________________________________________________________________________
leaky_re_lu_12 (LeakyReLU) (None, 160, 224, 32) 0 conv2d_12[0][0]
__________________________________________________________________________________________________
up_sampling2d_4 (UpSampling2D) (None, 320, 448, 32) 0 leaky_re_lu_12[0][0]
__________________________________________________________________________________________________
conv2d_13 (Conv2D) (None, 320, 448, 32) 9248 up_sampling2d_4[0][0]
__________________________________________________________________________________________________
leaky_re_lu_13 (LeakyReLU) (None, 320, 448, 32) 0 conv2d_13[0][0]
__________________________________________________________________________________________________
concatenate_4 (Concatenate) (None, 320, 448, 48) 0 leaky_re_lu_13[0][0]
leaky_re_lu_1[0][0]
__________________________________________________________________________________________________
conv2d_14 (Conv2D) (None, 320, 448, 32) 13856 concatenate_4[0][0]
__________________________________________________________________________________________________
leaky_re_lu_14 (LeakyReLU) (None, 320, 448, 32) 0 conv2d_14[0][0]
__________________________________________________________________________________________________
conv2d_15 (Conv2D) (None, 320, 448, 64) 18496 leaky_re_lu_14[0][0]
__________________________________________________________________________________________________
leaky_re_lu_15 (LeakyReLU) (None, 320, 448, 64) 0 conv2d_15[0][0]
__________________________________________________________________________________________________
conv2d_16 (Conv2D) (None, 320, 448, 64) 36928 leaky_re_lu_15[0][0]
__________________________________________________________________________________________________
leaky_re_lu_16 (LeakyReLU) (None, 320, 448, 64) 0 conv2d_16[0][0]
__________________________________________________________________________________________________
conv2d_17 (Conv2D) (None, 320, 448, 2) 514 leaky_re_lu_16[0][0]
__________________________________________________________________________________________________
mov_reg (InputLayer) (None, 320, 456, 2) 0
__________________________________________________________________________________________________
extract_moving (Lambda) (None, 320, 456, 1) 0 reg_mov[0][0]
__________________________________________________________________________________________________
dvf (ZeroPadding2D) (None, 320, 456, 2) 0 conv2d_17[0][0]
__________________________________________________________________________________________________
model_1 (Model) (None, 320, 456, 2) 192578 mov_reg[0][0]
__________________________________________________________________________________________________
img_registered (BilinearInterpo (None, 320, 456, 1) 0 extract_moving[0][0]
dvf[0][0]
__________________________________________________________________________________________________
inv_dvf (Lambda) (None, 320, 456, 2) 0 model_1[1][0]
==================================================================================================
Total params: 192,578
Trainable params: 192,578
Non-trainable params: 0
One important thing to note is the boolean compute_inv. When equal to True then the network
not only learns to warp the moving image such that it is as similar to the reference as possible but also
vice versa. In other words, it also learns to warp the reference image such that it is as similar to the moving
image as possible. Since our generator SupervisedGenerator can yield also inverse displacement fields
this is trivially done just via sharing weights and swapping the order of the inputs.
Loss function¶
Loss function together with the architecture is the most important component. We experimented with many different losses and ideas and found that losses that are based on the Perceputal Loss are superior in vast majority of cases. See The Unreasonable Effectiveness of Deep Features as a Perceptual Metric for more details.
The user can access the losses via two dictionaries:
atlalign.ml_utils.ALL_IMAGE_LOSSES- Losses on images (grayscale)atlalign.ml_utils.ALL_DVF_LOSSES- Losses on displacement fields
One important insight is that we can also apply image losses on displacement fields since displacements fields
are nothing else than 2 images - delta_x and delta_y. This is implemented in
atlalign.ml_utils.losses.DVF2IMG. Note that we also scale down the displacement by a constant.
from atlalign.ml_utils import ALL_DVF_LOSSES, ALL_IMAGE_LOSSES
set(ALL_IMAGE_LOSSES.keys()).issubset(set(ALL_DVF_LOSSES.keys()))
In what follows we describe some interesting and useful losses. They are all implemented in atlalign.ml_utils.losses.
Perceptual loss¶
Image loss that has four versions
perceptual_loss_net-lin_alexperceptual_loss_net-lin_vggperceptual_loss_net_alexperceptual_loss_net_vgg
If the string lin is contained then it refers to a model where linear layer inserted after the feature extractor.
The second string refers to the CNN used to extract features.
Vector distance and its clipped version¶
Displacement field loss that represents the average euclidean distance between the prediction and the ground truth. The average is taken over all pixels and all samples in the batch.
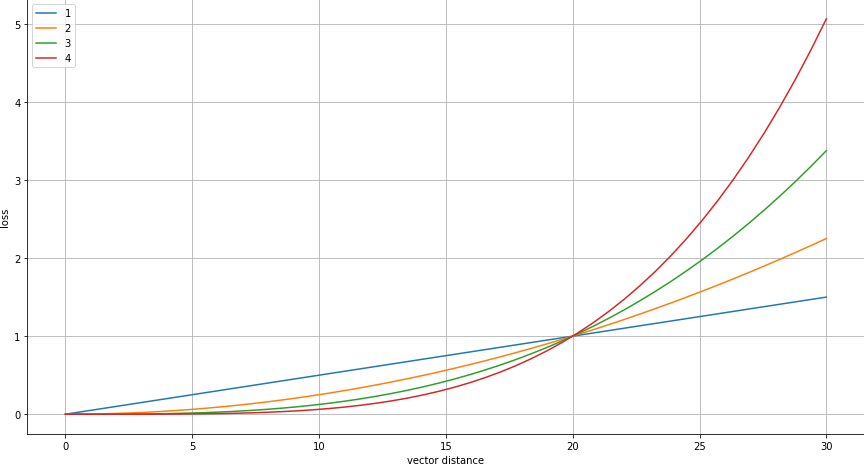
Note that instead of using the vector distance as the main loss one might just use it as a simple way how to prevent the network from resorting to some exit strategies. We call this a clipper vector distance.
In the below figure on can see the idea behind clipping. The user specifies a threshold (20) and a power
and the actual loss is then computed as loss = (vd / threshold) ** power.
See below the official keys of atlalign.ml_utils.ALL_DVF_LOSSES but not that one can easily add other versions
via atlalign.ml_utils.losses.VDClipper.
vector_distancevdclip2-threshold=20,power=2vdclip3-threshold=20,power=3
The idea behind having power > 1 is to punish the model for making big mistakes but be more forgiving on smaller ones.
Mixer¶
Mixer is a meta loss that simply takes two losses and computes their convex combination (by default just a mean). The
corresponding keys in atlalign.ml_utils.ALL_DVF_LOSSES have the form of first&second.
Saving model¶
After training one can easily save the model with a utility function atlalign.ml_utils.save_model. The first
argument represents the actual keras.Model instance and the second is the path (without extensions).
The keyword argument separate allows the user to select whether to save weights and architecture separately
or not. If done separately one loses the information on the loss function and the optimizer (and its state).